基础知识、启动和产品的所有常见问题 紧凑型控制器JUMO dTRON 16.1,紧凑型控制器JUMO cTRON,多通道过程和程序控制器JUMO IMAGO 500,过程控制器JUMO DICON 400、500、501和紧凑型控制器JUMO dTRON 304/308/316
控制器,如JUMO IMAGO 500、JUMO DICON 500,以及现在的新型JUMO dTRON系列。
新的JUMO dTRON系列,在设置程序中包括一个特殊的软件工具,用于监测和记录调试情况。
在设置程序中包括一个特殊的软件工具,用于监测和记录调试,从而使调试变得更加容易。
它大大简化了调试过程。
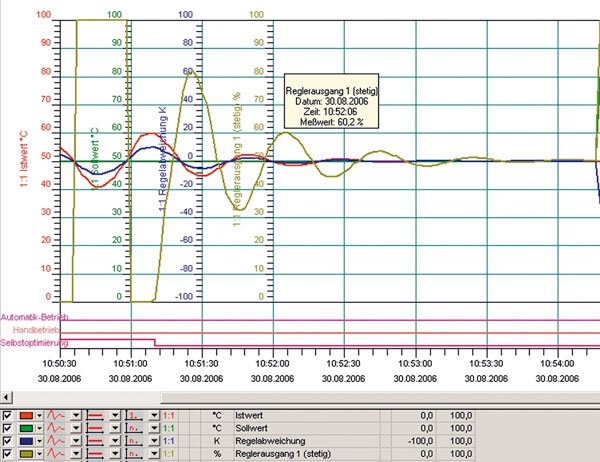
这个启动软件能够在系统优化的同时,对模拟和二进制信号进行可视化和存储。
特别是对于复杂的过程,实时的可视化展示
最重要的过程数据的实时可视化展示,对于控制工程师来说实际上是必不可少的。
控制工程师必不可少的。
系统优化所需要的是上述的控制器之一
的控制器之一,一台带有设置程序的PC或笔记本电脑,以及一个通过设置电缆连接的接口。
通过一根带有RS232或USB接口的设置电缆进行接口连接。
接口。这种连接对于设置程序来说是必需的,因此通常是可用的。
编程需要这种连接,因此通常可以使用。
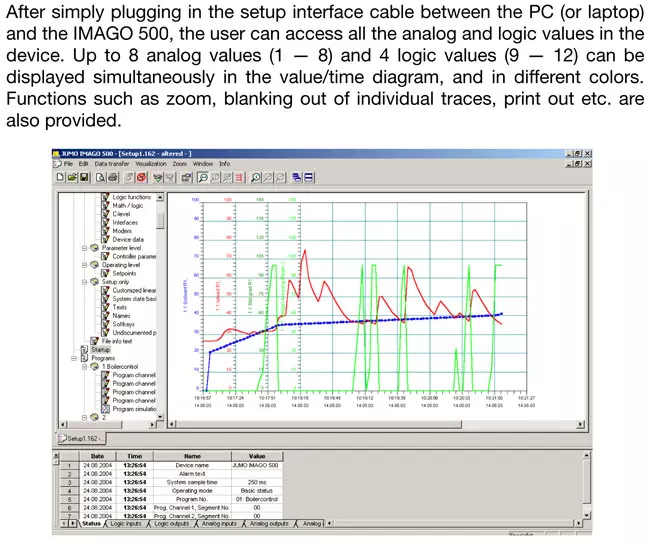
重要的设置,如自由选择信号来显示
仪器中的单个模拟值和二进制值,缩放。
各种打印选项,显示或隐藏个别曲线,自由缩放和选择颜色。
自由缩放和颜色选择都作为标准配置包含在这个软件工具中。
标准。
该程序的主要功能包括
该程序不仅有用,而且还提供了许多其他的
与传统的过程控制监测相比,它还具有许多其他优势--也是经济优势。
控制监测,例如。
控制器优化(或调谐)是指根据给定的过程或控制回路调整控制器。必须选择控制参数,以便在给定的操作条件下实现控制回路的最有利的响应。然而,这种最佳响应可以用不同的方式来定义,如快速达到设定点,有一个小的超调,或一个较长的稳定时间,没有超调。如果对控制器的期望是像限位触点那样的响应(没有脉冲操作),就没有必要为比例带、导数时间或复位时间找到最佳设置。只有开关差值需要被预先定义。
在大多数情况下,如果过程允许自我优化,控制器可以通过自我优化(自动调谐)功能自行确定控制参数。另外,也可以通过实验和经验方程(见附录中的公式),"手动 "确定最佳参数设置。
当控制器互换时,或有相同的控制装置时,也可以直接接受或输入控制参数。
在手动设置参数后,不能再启动自动调谐,因为这将覆盖设置。
根据震荡法进行设置的公式。
| 控制器动作 |
|
| P | XP = XPk / 0,5 |
| PI | XP = XPk / 0,45 T P = 0,85 ·TK |
| PID | XP = XPk / 0,6 Tn = 0,5 · TK Tv = 0,12 · TK |
根据阶梯响应进行设置的公式。
| 控制器动作 | 控制回路 | 误差 |
| P | XP = 3,3 · KS · (Tu/Tg) · 100 % | XP = 3,3 · KS · (Tu/Tg) · 100 % |
| PI | XP = 2,86 · KS · (Tu/Tg) · 100 % T n = 1,2 · Tg |
XP = 1,66 · KS · (Tu/Tg) · 100 % T n = 4 · Tu |
| PID | XP = 1,66 · KS · (Tu/Tg) · 100 % T n = 1 · Tg T v = 0,5 · Tu |
XP = 1,05 · KS · (Tu/Tg) · 100 % T n = 2,4 · Tu T v = 0,42 · Tu |
反过来。当过程值小于设定值时,控制器的输出Y大于0,或者继电器通电。
当过程值小于设定值时,继电器通电。
例如,加热)。
直接。 当过程值大于设定值时,控制器输出Y大于0,或者继电器通电。
当过程值大于设定值时,继电器通电。
冷却)。
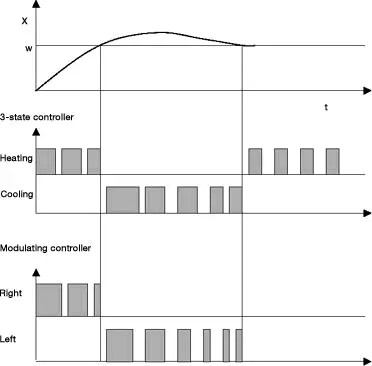
调制控制器和三态控制器一样,有两个开关控制输出。
开关控制输出,但是,这些输出是专门为电动执行器的驱动而设计的,例如用于打开或关闭。
然而,这两个输出是专门为电动执行器驱动而设计的,例如,用于打开或关闭。如果一个连续的
如果三态控制器需要一个连续的输出信号,以便
如果三态控制器需要一个连续的输出信号,以保持一定的输出水平,我们可以看到,在调制控制器的情况下
我们可以看到,在调制控制器的情况下,电动执行器的驱动将保持在
当没有来自控制器的进一步信号时,电动执行机构将保持在达到的位置。
因此,执行器驱动可以保持60%的开放,例如。
尽管在这一瞬间控制器没有对它进行操作。
数字输入滤波器(dF)用于抑制输入信号,并影响到指示和控制器。
对指示和控制器都有影响。dF "的值越大。
输入信号的阻尼就越大。一个非常高或非常低的
值会对控制质量产生不利影响。在大多数情况下
在大多数情况下,可以使用 "dF "的默认设置进行操作。
调制控制器有两个开关输出,特别设计用于操作执行器驱动装置,例如可以打开或关闭。
特别设计用于操作执行器驱动,例如,可以打开或关闭翻板阀。
例如,可以打开或关闭一个翻板阀。
可以操作的执行器/执行器驱动。
交流电机执行器、直流电机、三相电机执行器、带电磁阀的液压缸等。
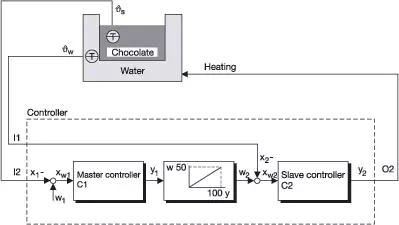
级联控制可以显著提高控制质量。这尤其适用于控制环路的动态作用,换句话说,在设定点变化或干扰之后,过程变量的转变。
例子1:级联的结构示意图
巧克力必须被加热到VS = 40 °C才能加工。巧克力的温度不得超过50°C(即使靠近加热器)。因此,它是在水浴上加热的。
为了达到快速稳定的目的,采用了级联控制。
控制器1始终是主控制器,控制器2始终是从控制器。
从属控制器的设定值是通过输出转换产生的。
控制输出y1使用过程值x2的单位转换为设定值(这里:0 - 100 % = 0 - 50 ℃)。
符号列表
O2 - 输出2
I1 - 模拟输入1
I2 - 模拟输入2
C1 - 控制器1
C2 - 控制器2
w
1 - 设定点控制器1
w
2 - 设定点控制器2
x
1 - 过程值控制器1
x
2 - 过程值控制器2
x
w1 - 偏差控制器1
x
w2 - 偏差控制器2
y
1 - 控制输出1
y
2 - 控制输出2;控制器2的输出1
v
s - 巧克力温度
v
w - 水浴温度
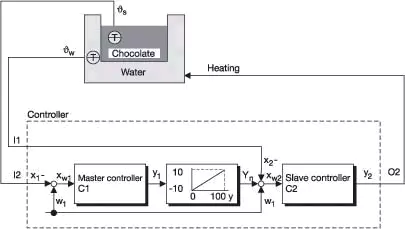
例2:修剪级联的构建
两批巧克力必须被加热到40 °C和50 °C。巧克力的温度不能超过设定值(甚至不能接近加热器)10°C以上。因此,它是在一个水浴上加热的。
修剪级联控制用于实现快速稳定,没有超调,并且在改变设定点(批次变化)时不改变控制器配置(输出转换)。
控制器1始终是主控制器,控制器2始终是从属控制器。
从属控制器的设定值是通过输出转换和主控制器设定值(w1)的增加而产生的。
在设定值转换中,控制输出y1被转换为一个以过程值w2为单位的数值。它相当于允许的最大温差(± | x1 - w1 |;这里:0 - 100 % = -10 to +10 °C)。
符号列表
O2 - 输出2
I1 - 模拟输入1
I2 - 模拟输入2
C1 - 控制器1
C2 - 控制器2
w1 - 设定点控制器1
x1 - 过程值控制器1
x2 - 过程值控制器2
xw1 - 偏差控制器1
xw2 - 偏差控制器2
y1 - 控制输出1
y2 - 控制输出2;输出1 o控制器2 vs - Chocolate temperature
vw - 水浴温度
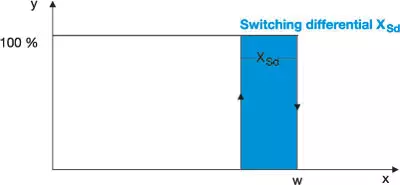
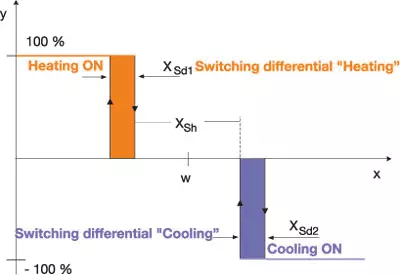
如果过程变量在围绕设定点的固定区间内变化,即触点间距Xsh,那么输出端就不会有任何变化。
触点间距Xsh,那么这两个输出都不会被激活。
活动。例外。带有I和D部分的3态控制器。在
触点间距内,只有比例成分是不活动的。
这种触点间距是必要的,以防止两个操纵变量之间的持续切换。
触点间距是必要的,以防止在控制变量不稳定时,两个操纵变量(如加热和冷却)之间的持续切换。
寄存器,当控制变量不稳定时。 触点间距
通常也被称为死区。太小的死区会导致
导致工厂毫无意义的能源浪费。
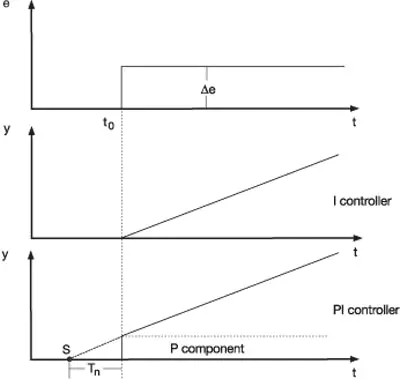
控制器输出信号的I分量具有以下作用
连续改变操纵变量,直到过程值达到设定值。
变化,直到过程值达到设定值。
只要控制偏差存在,操纵变量就会向上或向下整合。
被向上或向下整合。控制偏差的时间越长
偏差在控制器中持续存在的时间越长,对操纵变量的积分效应就越大。
对操纵变量的积分效应越大。控制偏差越大,复位时间越
偏差越大,复位时间越小,积分效应就越明显(越快)。
I分量的作用越明显(越快)。
I分量确保了控制环路的稳定,而没有永久的控制偏差。
永久性控制偏差。复位时间是一个衡量控制偏差持续时间对
控制偏差持续时间对控制动作的影响。一个较大的
复位时间越大,意味着I部分的效果越差,反之亦然。
在规定的时间Tn(秒)内,由P部分产生的操纵变量的变化。
在规定的时间Tn(秒)内,由P成分(xp或pb)产生的操纵变量的变化被添加一次
再加一次。因此,在P和I部分之间存在着一种固定的关系。
I部分之间有一个固定的关系。P成分(xp)的变化也意味着一个变化的
时间反应,在Tn的恒定值下。
在一个纯粹的比例控制器(P控制器)中,操纵变量(控制器输出Y)与控制偏差成比例。
变量(控制器输出Y)与控制偏差成正比。
在比例带内(Xp)。控制器的增益可以通过改变比例带与过程相匹配。
通过改变比例带来匹配过程。如果选择一个狭窄的
如果选择一个窄的比例带,一个小的偏差就足以达到
100%的输出,也就是说,增益随着比例带(Xp)的减少而增加。
即增益随着比例带(Xp)的减少而增加。控制器对窄比例带的反应更快、更明显。
更快、更明显。一个太窄的比例带会
导致控制回路的振荡。任何对比例带的改变
的任何改变都会对PID控制器的I和D动作产生同样的影响。
同样程度的影响。
如果比例带被设置为零,控制器的动作
是无效的。这意味着,控制器只作为一个
限位触点。所选择的滞后或开关差值是有效的,导数时间和复位时间的设置是有效的。
衍生时间和复位时间的设置是有效的。
但是,不考虑导数时间和复位时间的设置。
对于所有的控制器类型,除了三态(双定点)控制器外,只有比例带 X
控制器,只有比例带Xp1是相关的。对于三态
的情况下,需要对比例带进行单独设置(对于两个操作感应)。
运转感觉)是必要的(例如,Xp1用于加热,Xp2用于冷却)。
冷却)。
开关差值也被称为滞后,只与比例带=0的开关控制器有关。
只与比例带=0的开关控制器有关。
对于具有反操作感的控制器(如加热控制),标准响应如下。
开关差值位于设定值以下。这意味着
当设定值为0时,控制器正好关闭。 逾越了。
只有当过程值下降到低于开关点时,它才会再次开启。
处于设定值以下的开关点,即开关差值的数量。
开关差值。
在具有直接操作感的控制器上(如冷却),开关差值通常在设定值之上。
开关差值通常位于设定值之上。至于
的控制器,关断点是在设定点。
恰好在设定点上。然而,它又会在设定点之上被打开。
但在设定点之上再次开启,并以开关差值的大小为转移。
具有反操作意义的2状态控制器的开关动作。
不连续的三态控制器的开关动作。
执行机构的行程时间是一个由执行机构驱动提供的变量。
因此只适用于调节型控制器或
比例(连续)控制器,并带有集成的执行器驱动器。
执行机构驱动装置在整个可操作范围内移动一次所需的时间,在执行机构行程时间下设定。
在执行器行程时间下设置执行器驱动在整个可用操纵范围内移动一次的时间。
执行机构的行程时间不能通过自我优化(自动调谐)来确定。它必须总是在优化之前被设定。
执行机构的行程时间为控制器提供了以下信息
执行器行程时间为控制器提供了有关执行脉冲的效果的信息。在执行器行程时间为20
例如,在20秒内,操纵变量的百分比变化,在同一执行脉冲下
在相同的执行脉冲下,操纵变量的变化百分比要比执行器的100秒冲程时间大得多。
例如,100秒的行程时间。
在选择执行器驱动装置或确定其尺寸时,必须考虑到
考虑到一个短的冲程时间,比如说,小于10秒的冲程时间,会导致操纵变量的较大步长。
导致操纵变量的大步幅,并因此导致控制精度的降低。
控制精度降低。例如,如果我们假设0.5秒
是最短的执行脉冲时间,10秒的冲程时间将导致只有20个执行步骤。
导致只有20个执行步骤。这就意味着操纵变量只能以5%的速度变化。
变量只能以5%的步长进行改变。
然而,具有很长冲程时间的推杆传动装置可能是
就动力学而言,是不利的,因为
因为操纵变量只能通过控制动作相对缓慢地改变。
控制动作来改变。然而,在实际运行中,由于行程时间太短而产生的问题
在实际操作中,由太短的冲程时间引起的问题比由太长的冲程时间引起的问题更经常发生。
导致的问题。
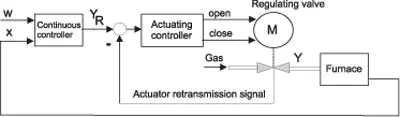
简称 "执行控制器 "是用来描述一个
"带集成执行器驱动器的比例控制器"。相比之下
与调制控制器不同,执行器的反馈信号对执行控制器来说是必不可少的。
对于执行控制器来说,执行器反馈信号是必不可少的。
执行控制器通过2个开关输出控制电动执行器的顺时针或逆时针运动。
电动执行器的位置被记录下来,并与操纵变量(yR)进行比较。
比例控制器的操纵变量(yR)。
D分量(差分量)的强度可以通过导数时间设定。具有PID或PD作用的控制器的D分量对过程值的变化率作出反应。
当接近设定点时,D分量作为一个制动器,从而防止控制变量过高地达到设定点。
基本上,D组分有以下作用。
一旦控制变量发生变化,D分量就会对这种变化作出反应。
对于一个具有反操作意义的控制器(即用于加热),这意味着,例如
二态控制器(ON/OFF控制器)在达到设定值时切换输出。
达到设定值时,开关输出。如果该值低于设定值的一个
某个可调节的公差(xsd,开关差值,滞后)。
那么输出就会再次打开。因此,它只有两个
开关状态。它被用于温度控制应用中,其中
加热或冷却只被打开或关闭。
然而,一个带动态的2状态控制器也可以用P、I或D元件操作。
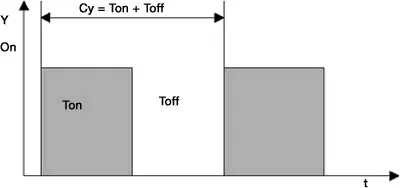
开关周期时间以秒为单位,定义为
在这段时间内,一个完整的开关周期包括开启和关闭时间。
的时间。
一般来说,周期时间的选择应使实际的
控制过程仍然可以平滑地进行。同时,还必须考虑
必须始终考虑到开关频率。
响应最好在手动模式下重新设置,这样就可以直接了解操纵变量对周期时间的影响。
这样就可以监测操纵变量对循环时间的直接影响。
监测。当操纵变量为50%时,"Ton "和 "Toff "相等。
相等。如果操纵变量被改变,这个比例也会相应改变。
相应改变。